adv. intel. sys. 哈工大

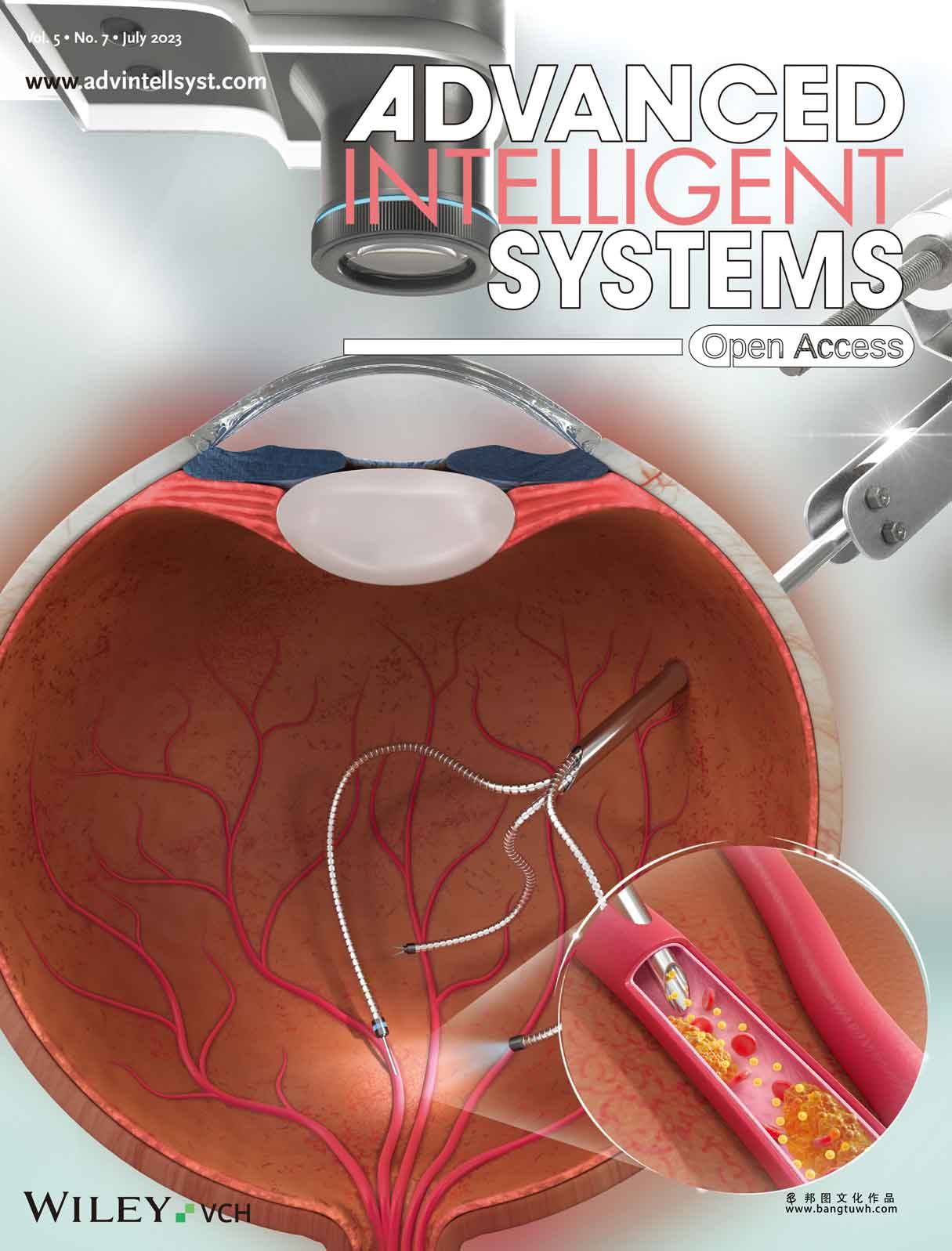
视网膜是覆盖在眼底的一层非常薄,精密,且脆弱的神经性组织,尤其是视网膜血管,直径非常小,约为0.2mm左右。因此视网膜血管注药手术是目前难以实现的手术之一。
视网膜血管穿刺成功的两个重要的因素:一个是穿刺角度,即针与血管之间形成很好的进针角度。二是对穿刺时的力进行监测,当穿刺成功瞬间停止进针,防止视网膜组织损伤。
传统的传感器在测量精度和体积上均不能实现上述两个要求。为此研制了一款长度仅为3.8mm微型三维力传感器模组。为了实现进针角度的调整,在眼内执行器末端设计了柔性关节。将该传感器安装在柔性关节末端实现了视网膜血管穿刺角度调整和力感知监测。
传感器、执行器以及眼科机器人实际上可以定义为:首款带有微小力感知的眼内灵巧手,相比于眼内的刚性器械,在眼内具有更多的灵活度和可操作性。同时具有三维力感知功能,能够进一步保证手术安全性。